Tesla Pod - Concept
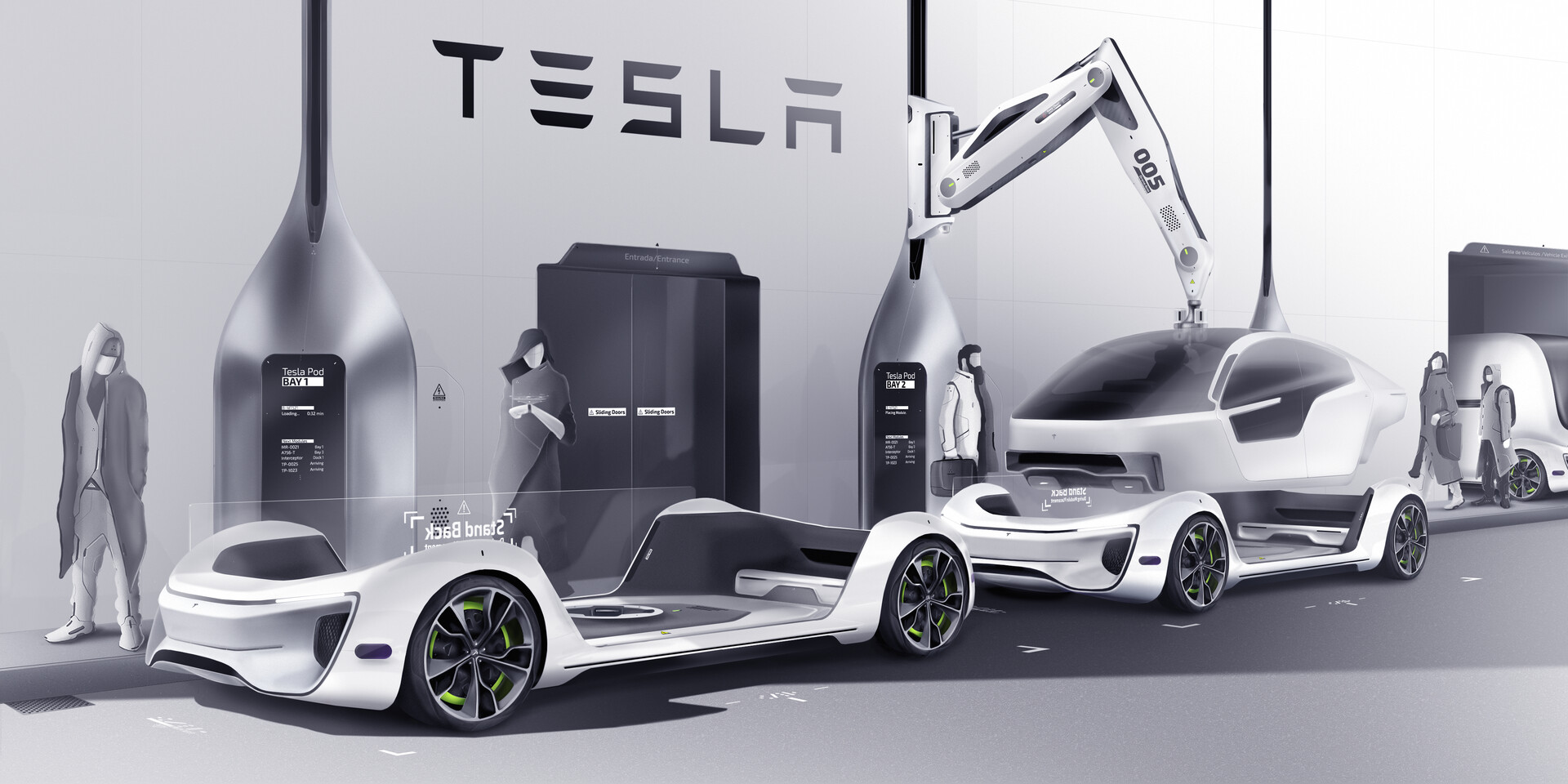
Tesla Pod is my Design Master's Thesis which consists of a Modular Autonomous Electric Platform for Urban Transport of People and Goods.
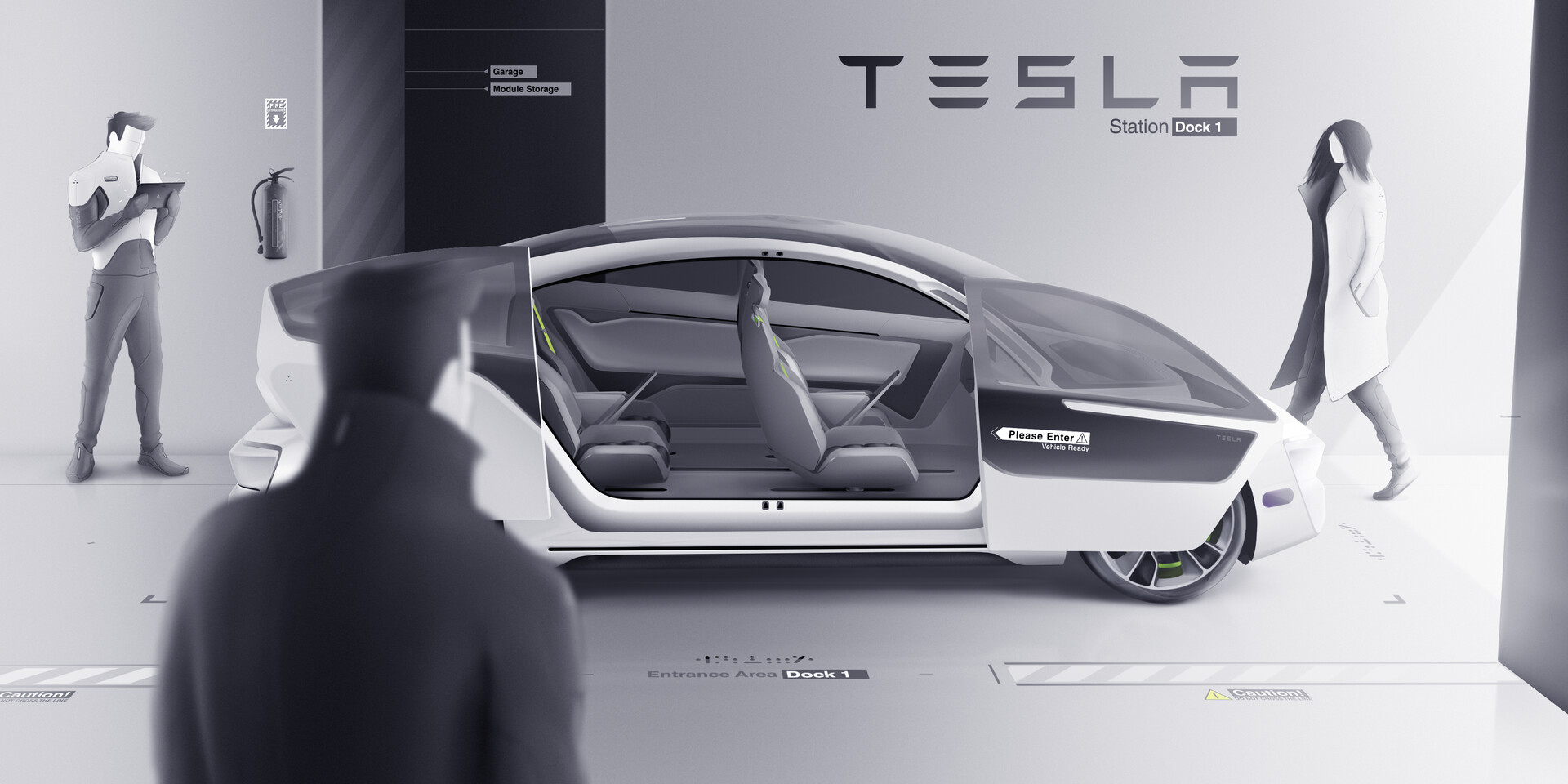
The Platform is equipped with LIDAR, RADAR, Ultrasonic and Optical Sensors in order to achieve level 5 autonomous driving, to which are attached different modules, developed to fulfill different tasks related to the transport of people and goods through urban environments. The platform is symmetric, this means the symmetry of components. in order to reduce considerably the cost of production of each platform, allowing the integration of autonomous systems in the vehicle while maintaining a low price to the consumer. this also allows for the platform to have 4 wheel steering and be able to move forward or backwards, with 4 in-wheel motor based on the Elaphe In-wheel Motor, at the same speed and level of stability and control, making the vehicles very agile in tight urban areas.
In the middle of the Platform there can be found the central retention sy